 Click to enlarge Click to enlarge
|
Description
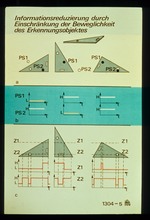
Zur Reduzierung des gerätetechnischen Aufwandes sowie zur Verringerung der Reaktionszeit des Gesamtsystems erscheint es folgerichtig, die zu verarbeitende Informationsmenge auf das mögliche Mindestmaß zu beschränken. Dia 1304/5 zeigt hierfür am Beispiel eines flachen, dreieckförmigen Teiles, das aus seiner aktuellen Drehlage heraus durch den Roboter gegriffen werden soll, zwei prinzipielle Lösungswege. Beiden ist gemeinsam, dass durch die Art des Teiletransports sowie durch Anlaufen des Teils gegen einen Anschlag die möglichen Drehlagen auf 3 begrenzt werden.
Lösungsweg a benutzt einen hierzu senkrechten zweiten Anschlag, gegen den das Teil mit seiner äußersten linken Begrenzung anläuft. Zwei in dem dadurch entstandenen Quadranten fest installierte binäre Punktsensoren PS1 und PS2 geben dann über die Kombinationen LH, HL bzw. HH die vorliegende aktuelle Drehlage an.
Lösungsweg b verzichtet auf den zweiten Anschlag und wertet zwei ausgewählte Zeilen ZI und Z2 einer mit einer Binärbildkamera aufgenommenen Silhouette des Teiles aus. Gibt man beispielsweise für ZI und Z2 die jeweilige Gesamtdauer des H-Pegels als Impulszahl aus, so entstehen für die 3 möglichen aktuellen Drehlagen charakteristische Zahlenkombinationen.
Attributes
|





