 Click to enlarge Click to enlarge
|
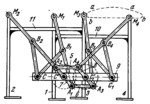
Description
The lengths of the links comply with the conditions: A͞₁B₁=B͞₁C=B͞₁M₁=A͞₂B₂=B͞₂C=B͞₂M₂=A͞₃B₃=B͞₃C₁=B͞₃M₃=A͞₄B₄=B͞₄C₁=B͞₄M₄=1, A͞₁C̕=A͞₂C̕=A͞₃C̕₁=A͞₄C̕₁=0.355, C͞C͞‘=C͞₁C͞‘₁=0.785, A͞₂A₄=A͞₁A₃=C͞‘C͞‘₁=0.634; The mechanism consists of four identical Chebyshev lambda-shaped parallel motions: C‘A₁B₁C, C‘A₂B₂C, C‘₁A₃B₃C₁ and C‘₁A₄B₄C₁. Together with cranks 7 and 8, links 5 and 6 form parallel-crank linkage A₁A₂A₄A₃. If frame 9 is fixed, then points M₁, M₂, M₃ and M₄ describe connecting-rod curves of a shape resembling curve a-a and having an approximately straight portion b-b which corresponds to rotation of cranks 7 and 8 through an angle of 180°. Secured rigidly to link 10 are "feet" 1 and 4, and to link 11 are "feet" 2 and 3. If frame 9 is moved in rectilinear translat ion from the position shown in the drawing in either direction, then, while points M₁ and M₄ remain on their straight portions of their relative paths, "feet" 1 and 4 are stationary and "feet" 2 and 3 move along the direction of motion of frame 9. At the moment that points M₁ and M₄ leave the straight portion of their paths, points M₂ and M₃ begin the straight portion of their paths. At this, "feet" 2 and 3 will be stationary and "feet" 1 and 4 will move along the direction of motion of frame 9. Thus the mechanism seems to reproduce the motions of the legs of an animal.
$611$LW,ML$
|





