 Dokument öffnen
Dokument öffnen
|
Allgemeine Angaben |
| Autor |
Borràs, Júlia; Ottaviano, Erika; Ceccarelli, Marco; Thomas, Federico |
| Erschienen |
Asociación Española de Ingeniería Mecánica, Oviedo, 2008
|
| Ausgabe |
|
| Umfang |
|
| ISBN |
|
| Kurzbeschreibung |
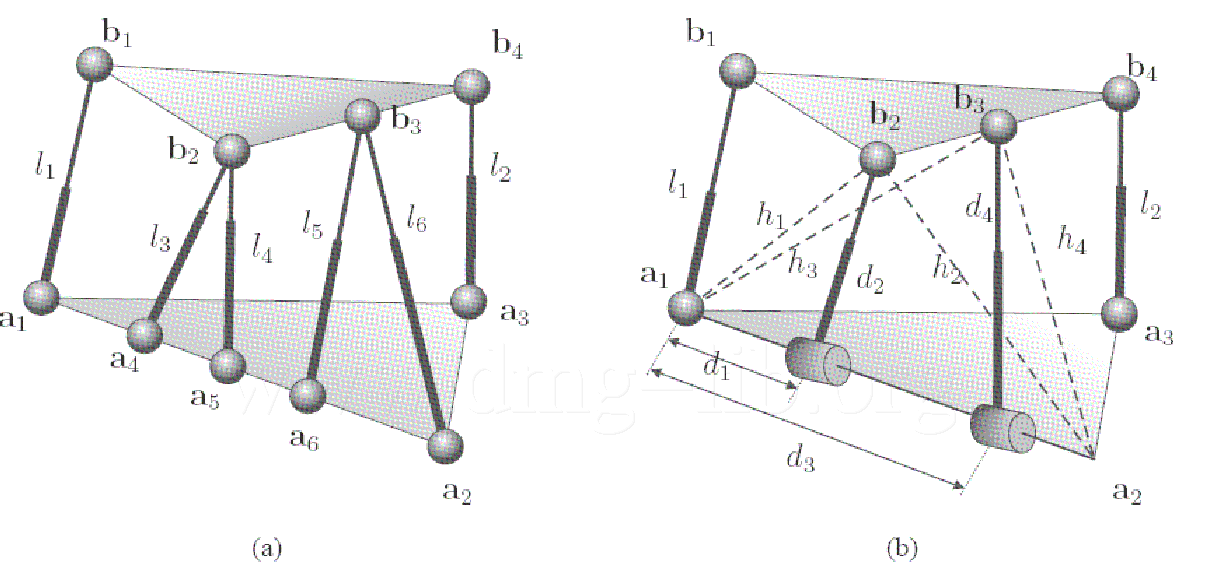
Júlia Borràs, Erika Ottaviano, Marco Ceccarelli, Federico Thomas, "Optimal Design of a 6-DOF 4-4 Parallel Manipulator with Uncoupled Singularities". Asociación Española de Ingeniería Mecánica, Oviedo, (2008).
"Optimal Design of a 6-DOF 4-4 Parallel Manipulator with Uncoupled Singularities". Asociación Española de Ingeniería Mecánica, Oviedo, (2008).
|
|






