





|
|
|||||||
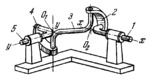
DOUBLE HOOKE'S JOINT |
|||||||
|---|---|---|---|---|---|---|---|
 Ansicht vergrößern Ansicht vergrößern
|
Beschreibung
Links 1 and 5 are connected by turning pairs to the base and to links 2 and 4. Link 3 is connected by turning pairs to links 2 and 4. Upon rotation of link 1 about axis x-x, link 5 rotates about axis y-y under the condition that the axes of all pairs intersect at two points 0₁ and 0₂, three axes at each point. |
||||||
| Verknüpfte Datensätze | |||||||
|
|||||||
| Permanentlinks | |||||||
|
|
|||||||
| Datenbereitsteller | |||||||
|
|
|||||||