





|
|
|||||||
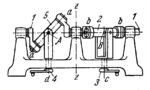
SIX-BAR SPATIAL MECHANISM |
|||||||
|---|---|---|---|---|---|---|---|
 Ansicht vergrößern Ansicht vergrößern
|
Beschreibung
Link 1 is designed in the form of a crankshaft having skew journals with axes a-a and b-b. The axes of the turning kinematic pairs, connecting links 1, 4 and 5, and 1, 2 and 3, intersect, respectively, at points A and B. Upon rotation of link 1 about its fixed axis, links 3 and 4 oscillate about axes c and d. The mechanism is symmetrical with respect to axis z-z. |
||||||
| Verknüpfte Datensätze | |||||||
|
|||||||
| Permanentlinks | |||||||
|
|
|||||||
| Datenbereitsteller | |||||||
|
|
|||||||