 Ansicht vergrößern Ansicht vergrößern
|
Beschreibung
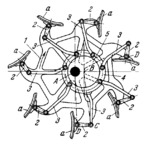
This mechanism is based on double-swing linkage ABCD which consists of links 1, 2 and 4. Hinge B is designed as fixed disk 5 encircled by collar 4. Grouser a is secured rigidly to link 2. Collar 4 is connected by turning pairs to links 3 which, in turn, are connected by turning pairs to links 2. Upon rotation of link 1, link 2 has complex motions during which grousers a are in the vertical position after each half revolution of link 1, with link 2 in the lower position.
$619$LW,ML$
|





