





|
|
|||||||
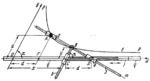
LEBEAU LINK-GEAR HYPERBOLOGRAPH MECHANISM |
|||||||
|---|---|---|---|---|---|---|---|
 Ansicht vergrößern Ansicht vergrößern
|
Beschreibung
Slider 1, moving along fixed guides q-q, is connected by turning pair D to slider 4 and by a sliding pair to link 5. Link 5 is connected by turning pair B to link 3 which moves in sliders 4 and 2 . Slider 2 turns about fixed axis A. When slider 1 moves along guides q-q, point B describes equilateral hyperbola p-p with the equation xy=d² where d is a constant dimension of the mechanism. Axes Ox and Oy are asymptotes of hyperbola p-p. |
||||||
| Verknüpfte Datensätze | |||||||
|
|||||||
| Permanentlinks | |||||||
|
|
|||||||
| Datenbereitsteller | |||||||
|
|
|||||||