 Ansicht vergrößern Ansicht vergrößern
|
Beschreibung
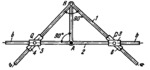
Link 2 has the form of a T-shaped lever and turns about fixed axis A which is the centre of inversion transformation. Link 2 is connected by turning pair B to bent link 1. Sliders 3 and 5, connected together by turning pair P, and sliders 4 and 5, connected together by turning pair Q, move along cross-piece b-b of link 2 and arms Ba of link 1. For any configuration of the mechanism, points Q, A and P lie on straight line b-b. When point P or Q travels along any arbitrary curve, the other point describes a curve which is an inversion of the first curve. Hence, the mechanism accomplishes inversion transformations of the form A͞PxA͞Q=A͞B²=const.
$1368$LG,GI$
|





