 Ansicht vergrößern Ansicht vergrößern
|
Beschreibung
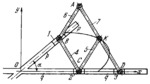
The lengths of the links comply with the conditions: A͞B=B͞C=C͞K=K͞A=K͞D=l. Slider 1 moves along fixed guides p-p. Sliders 2 and 3 move along fixed guides q-q whose axis makes the angle α with the axis of guides p-p. Links 4 and 5 are connected by turning pairs C to slider 2. Link 7 is connected by turning pairs D, K and A to slider 3 and to links 5 and 6. Links 4 and 6 are connected by turning pairs B to link 1. When slider 1 moves along guides p-p, point K describes an ellipse with the equation 4a²x²+(1+a²)y²-4axy-4a²l²=0 where a=tan(α).
$1622$SC,Ge$
|





