 Ansicht vergrößern Ansicht vergrößern
|
Beschreibung
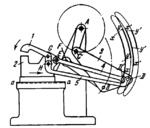
The lengths of the links comply with the conditions: B͞C=2A͞C, B͞D'=0.9A͞C, B͞D=1.1A͞C, C͞D=2.55A͞C, C͞D’=2.32A͞C, B͞F=2A͞C, A͞F=1.6A͞C, E͞D'=2.8A͞C, H͞D=3.6A͞C and H͞G=0.35A͞C. Connecting rod 3 actuates links 4 and 5. Link 4 is connected by turning pair E to slider 2 which reciprocates along fixed guides a-a. Link 5 is connected by turning pair H to link 1 which turns about axis G of slider 2. Slider 2 has dwells during the periods of time while point D' travels along portions x-x and x'-x' of its path since these portions approximate circular arcs described from the corresponding positions of point E. The stock is gripped and held by link 1, and it is released and link 1 is kept open, during the periods of time while point D travels along portions y-y and along y'-y' of its path since these portions approximate circular arcs described from the corresponding positions of point H.
$1644$SC,GC$
|





