





|
|
|||||||
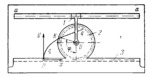
THREE-LINK TOOTHED MECHANISM FOR TRACING CYCLOIDS |
|||||||
|---|---|---|---|---|---|---|---|
 Ansicht vergrößern Ansicht vergrößern
|
Beschreibung
When slider 1 moves along fixed guides a-a, pinion 2 rolls along fixed straight rack 3. Any point K of pinion 2 describes cycloid q-q. The parametric equations of the cycloid are x=r(ϕ-sin(ϕ)) and y=r(1-cos(ϕ)) where r=O͞K, and ϕ is the angle of rotation of pinion 2. In rectangular coordinates xOy, the equation of cycloid q-q in the explicit form is x=r arccos(((r-y)/r)±sqrt((2r-y)y)). |
||||||
| Verknüpfte Datensätze | |||||||
|
|||||||
| Permanentlinks | |||||||
|
|
|||||||
| Datenbereitsteller | |||||||
|
|
|||||||