





|
|
|||||||||||||
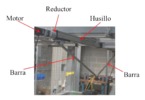
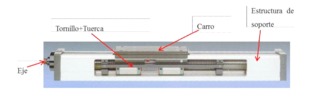
Diseño mecatrónico de un mecanismo de dos grados de libertad con accionamientos lineales |
|||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|

|
|
||||||||||||
| Sammlungen | |||||||||||||
|
|||||||||||||
| Bilder | |||||||||||||
                                                                     |
|||||||||||||
| Permanentlinks | |||||||||||||
|
|
|||||||||||||
| Datenbereitsteller | |||||||||||||
|
|
|||||||||||||
| Verwaltungsinformationen | |||||||||||||
|
|||||||||||||