 Ansicht vergrößern Ansicht vergrößern
|
Beschreibung
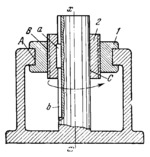
Link 1 is connected by turning pair A to the fixed link and by screw pair B to link 2 which, in turn, is connected by sliding pair C to the fixed link. The sliding motion of link 2 is obtained by its feather a which enters keyway b in the fixed link. Rotation of link 1 is converted into sliding motion of link 2. When link 1 is turned through the angle ϕ₁, the displacement of link 2 along axis x-x is s₂=-h_B(ϕ₁/(2π)) where h_B is the pitch of the thread in screw pair B. It is taken with a plus sign for right-hand thread and with a minus sign for left-hand thread.
$2219$LS,3L$
|





