 Ansicht vergrößern Ansicht vergrößern
|
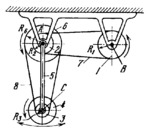
Beschreibung
Pulley 1 rotates about fixed axis B. Rigidly attached pulleys 2 and 6 rotate about fixed axis A. Pulley 3 rotates about axis C of pendulum 5 which oscillates about axis A. Disk 4 is keyed to the shaft of pulley 3 and is used to perform a processing operation. Flexible links 7 and 8 run over pulleys 1 and 2, and 6 and 3. The angular velocities of pulleys 1 and 3, and of pendulum 5 are related by the equation ω₅=(R₁R₆ω₁-R₂R₃ω₃)/(R₂*(R₆-R₃)) where ω₁, ω₃, ω₅, R₁, R₂, R₃ and R₆ are the angular velocities and radii of pulleys 1, 2, 3 and 6 and pendulum 5.
$3566$CFL,DF$
|





