





|
|
|||||||
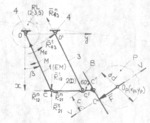
Self centering gripper, calculus scheme for forces |
|||||||
|---|---|---|---|---|---|---|---|
 Ansicht vergrößern Ansicht vergrößern
|
Beschreibung
Calculus scheme for reactions in kinematic joints am the acting moment for a finger of the self centering gripper for loading a lathe with disc type workpieces |
||||||
| Verknüpfte Datensätze | |||||||
|
|||||||
| Permanentlinks | |||||||
|
|
|||||||
| Datenbereitsteller | |||||||
|
|
|||||||