 Ansicht vergrößern Ansicht vergrößern
|
Beschreibung
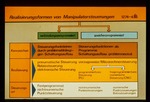
Verbindungsprogrammierte Informationsverarbeitung bedeutet Realisierung von Steuerungsfunktionen durch problemabhängigen Schaltungsaufbau. Bei speicherprogrammierter Informationsverarbeitung werden diese Funktionen durch Programme realisiert; der zur Programmverarbeitung erforderliche Schaltungsaufbau ist problemneutral. Einfache Steuerungsaufgaben mit geringem Umfang werden in der Handhebetechnik vorzugsweise verbindungsprogrammiert verwirklicht. Die Mikroelektronik, insbesondere die Mikrorechentechnik, führt zu einer heute überwiegend speicherprogrammierten Realisierung von Manipulator- insbesondere Industrierobotersteuerungen in den Grundvarianten PC und CNC.
Attribute
|





