





|
|
|||||||||||||||
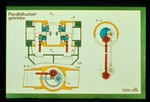
Parallelkurbelgetriebe |
|||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
 Ansicht vergrößern Ansicht vergrößern
|
Beschreibung
Das Bild zeigt den Schnitt durch das Gelenk eines Drehgelenkarmes mit dem Parallelkurbelgetriebe zur Weiterleitung zentraler Antriebsbewegung auf ein Armglied, z. B. auch eines Handgelenkgliedes (IR ZIM 60 und IR 60 E). UA (gelb) ist das Unterarm-, 0A (grün) das Oberarmglied. Attribute
|
||||||||||||||
| Sammlungen | |||||||||||||||
|
|||||||||||||||
| Permanentlinks | |||||||||||||||
|
|
|||||||||||||||
| Datenbereitsteller | |||||||||||||||
|
|
|||||||||||||||