Estructura del mecanismo |
| Función |
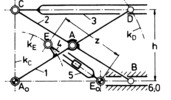
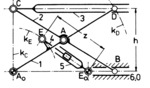
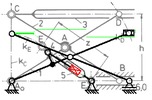
Bild 2.1/7 zeigt eine Hebebühne, deren obere Platform durch einen Hydraulikzylinder zwischen den Drehgelenken E0 und E gehoben und gesenkt werden kann.
Das kinematische Schema der Hebebühne (Bild 2.1/8) zeigt ein sechsgliedriges Getriebe mit fünf Drehgelenken (A0, E0, A, E, C), einem Schubgelenk zwischen Hydraulikkolben und -zylinder (Glieder 4 und 5) und zwei Gleitdrehgelenken. Ersetzt man die Gleitdrehgelenke durch Gleitsteine mit Dreh- und Schubgelenken, erhält man das hier beschriebene äquivalente achtgliedrige Kurbelgetriebe mit Dreh und Schubgelenken. |
| Dimensión del mecanismo |
plano |
| Número de elementos |
6 |
| movimiento motor |
Traslación rectilínea |
| Movimiento de salida |
Movimiento del sistema de referencia |
| Grados de libertad |
1 |
| Número de entradas |
1 |
| Número de seguidores |
1 |
| Capacidad de rotabilidad |
no |
| Capacidad de rotabilidad del elemento de entrada |
no |
| Posición relativa entre motor y salida |
paralelo |
| |
Función de guía |
| Dirección del enlace |
dirección idéntica |
| Orientación del elemento de salida |
paralelo |
| Dimensión del mecanismo |
plano |
| Referencia de entrada |
posible |
| Variación de la orientación con respecto al elemento de salida |
varios |
| |
Aplicación |
| Área de aplicación |
Transport/Traffic |
| Ejemplos de aplicación |
Hebebühne |
| |






 Animations
Animations Images
Images
 Start interactive animation
Start interactive animation