





|
|
|||||||
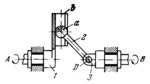
FOUR-BAR SPATIAL MECHANISM |
|||||||
|---|---|---|---|---|---|---|---|
 Pinche para ampliar Pinche para ampliar
|
Description
Link 1, rotating about fixed axis A, is connected by a four-motion kinematic pair to link 2. This pair consists of spherical surface a of link 2 which contacts internal cylindrical surface b of link 1. Link 2 is connected by turning pair D to link 3 which rotates about fixed axis B. The mechanism transmits rotation between any two arbitrarily located axes A and B. |
||||||
| Linked items | |||||||
|
|||||||
| Permanent links | |||||||
|
|
|||||||
| Data provider | |||||||
|
|
|||||||