 Pinche para ampliar Pinche para ampliar
|
Description
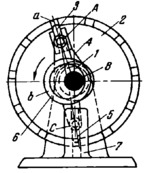
Eccentric 1 rotates about fixed axis B and is encircled by collar b of link 6. Link 6 is a two-armed lever. Pin 3 is connected by turning pair A to the upper arm of link 6 and slides along guiding link 4 which turns freely about axis B. Pin 5 is connected by turning pair C to the lower arm of link 6 and slides along fixed guide 7. When eccentric 1 rotates, the upper arm of link 6 has a complex motion in which pin 3 engages, moves forward and disengages successive grooves a of member 2 which thereby rotates intermittently, in the same direction as eccentric 1, about axis B. While pin 3 disengages one slot a, another slot a is engaged by pin 5 which holds member 2 stationary until pin 3 engages the next slot.
$1353$LG,D$
|





