 Pinche para ampliar Pinche para ampliar
|
Description
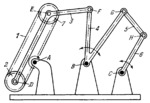
Flexible link 1 runs over pulleys 2 and 7, of equal diameter, and oscillates about fixed axis A. Link 3, designed as a bent lever, is connected by turning pairs D and E to pulleys 2 and 7 and by turning pair F to link 4. Link 4, designed as a bent lever, turns about fixed axis B and is connected by turning pair G to link 5. Link 6 turns about fixed axis C and is connected by turning pair H to link 5. When flexible link 1 turns about axis A, links 3 and 5 have complex motions and links 4 and 6 oscillate about axes B and C.
$2004$FL,TC$
|





