Estructura del mecanismo |
| Función |
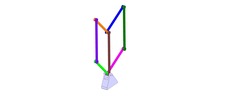
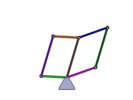
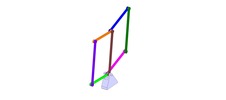
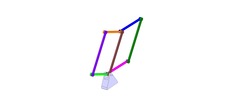
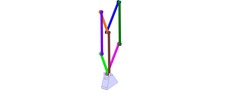
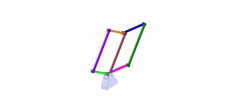
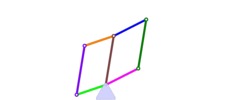
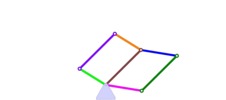
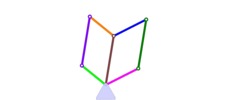
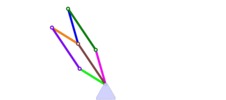
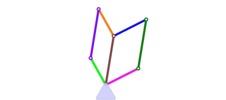
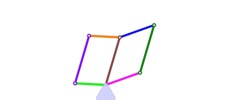
Mechanism used to transport straight objects. This is a 3D mechanism but based on the kinematics of a planar mechanism (7 bar + bati). |
| Comment |
Authors : Poerava ROUSSEAU from I Artobolevski model
Modified by : Miguel PEREZ BORRAJO
IFMA (French Institute for Advanced Mechanics) - http://www.ifma.fr
Clermont-Ferrand, FRANCE
This model is based on a mechanism described by Artobolevskij under number 742.
The mechanism is shown here.
The model and all attached items were made within this context. |
| Dimensión del mecanismo |
plano |
| Número de elementos |
8 |
| movimiento motor |
Rotación combinada con traslación rectilínea |
| Grados de libertad |
1 |
| Número de entradas |
2 |
| Número de seguidores |
3 |
| Capacidad de rotabilidad del elemento de entrada |
sí |
| Posición relativa entre motor y salida |
paralelo |
| |
Aplicación |
| Área de aplicación |
Transport/Traffic |
| Ejemplos de aplicación |
Mechanism for transmission of movement |
| |







 Animations
Animations CAX files
CAX files Documents
Documents Videos
Videos Images
Images