





|
|
|||||||||||||
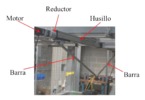
Diseño mecatrónico de un mecanismo de dos grados de libertad con accionamientos lineales |
|||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|

|
|
||||||||||||
| Collections | |||||||||||||
|
|||||||||||||
| Images | |||||||||||||
                                                                     |
|||||||||||||
| Permanent links | |||||||||||||
|
|
|||||||||||||
| Data provider | |||||||||||||
|
|
|||||||||||||
| Administrative information | |||||||||||||
|
|||||||||||||