|
|
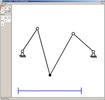
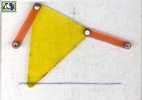
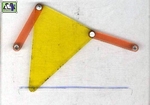
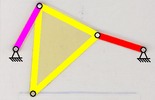
Dreiecklenker (nach Roberts) |
  | Premi per ingrandire |
|
Struttura del meccanismo |
| Funzione |
Führungsgetriebe zur angenäherten Geradführung des Koppelpunktes |
| Dimensione del meccanismo |
planare |
| Numero di membri |
4 |
| Movimento del movente |
Rotazione |
| Moto del cedente |
Posizione |
| Gradi di libertà |
1 |
| Numero di membri moventi |
1 |
| Numero di membri cedenti |
1 |
| Capacità di rotazione |
no |
| Capacità di rotazione del membro movente |
no |
| Posizione relativa tra movente e cedente |
parallelo |
| |
Funzione di movente |
| Direzione della traiettoria |
direzione opposta |
| Orientazione del membro cedente |
complessivo |
| Dimensione del meccanismo |
planare |
| Riferimento del movente |
no |
| Verso di orientazione del membro cedente |
Vario |
| |
Applicazione |
| Area di applicazione |
Academic use |
| |
|
| Collections |
| |
|
| Permanent links |
| |
|
| Data provider |
| |
|
| Amministrazione |
| |
| Luogo di origine |
|
Technische Universität Chemnitz, Professur Mechatronische Antriebstechnik |
| Produttore |
|
TH Karl-Marx-Stadt |
| Costruzione, materiale |
|
Modell für Overheadprojektor, Plexiglas |
| Dimensioni |
|
130mm x 130mm |
|
| Further media formats |
 Animations Animations |
|
 CAX files CAX files |
|
 Images Images |
|






 Start interactive animation
Start interactive animation