Struttura del meccanismo |
| Funzione |
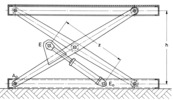
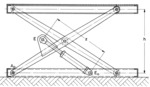
Bild 2.1/7 zeigt eine Hebebühne, deren obere Platform durch einen Hydraulikzylinder zwischen den Drehgelenken E0 und E gehoben und gesenkt werden kann.
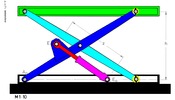
Das kinematische Schema der Hebebühne (Bild 2.1/8) zeigt ein sechsgliedriges Getriebe mit fünf Drehgelenken (A0, E0, A, E, C), einem Schubgelenk zwischen Hydraulikkolben und -zylinder (Glieder 4 und 5) und zwei Gleitdrehgelenken. Ersetzt man die Gleitdrehgelenke durch Gleitsteine mit Dreh- und Schubgelenken, erhält man das hier beschriebene äquivalente achtgliedrige Kurbelgetriebe mit Dreh und Schubgelenken. |
| Dimensione del meccanismo |
planare |
| Numero di membri |
8 |
| Movimento del movente |
Traslazione rettilinea |
| Moto del cedente |
Moto del telaio |
| Gradi di libertà |
1 |
| Numero di membri moventi |
1 |
| Numero di membri cedenti |
1 |
| Capacità di rotazione |
no |
| Capacità di rotazione del membro movente |
no |
| Posizione relativa tra movente e cedente |
parallelo |
| |
Funzione di movente |
| Direzione della traiettoria |
direzione identica |
| Orientazione del membro cedente |
parallelo |
| Dimensione del meccanismo |
planare |
| Riferimento del movente |
possibile |
| Verso di orientazione del membro cedente |
Vario |
| |
Applicazione |
| Area di applicazione |
Academic use and Other fields |
| Esempi di applicazione |
Hebebühne |
| |






 Animations
Animations Images
Images
 Start interactive animation
Start interactive animation