 Premi per ingrandire Premi per ingrandire
|
Description
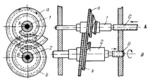
Link 1 rotates about fixed axis A and is connected by screw pair C to the base. Rigidly attached to link 1 is spiral-engagement gear a, designed with its toothed rim along a conical helix (three-dimensional spiral). Gear a meshes with spiral-engagement gear b which is rigidly attached to link 2. Link 2 rotates about fixed axis B and is connected by screw pair D to the base. When link 1 rotates at uniform velocity, link 2 rotates with nonuniform velocity.
$2340$SG,3L$
|





