 Premi per ingrandire Premi per ingrandire
|
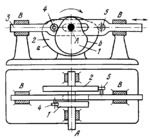
Description
Main and return cams 1 and 2 are rigidly attached together and rotate about fixed axis A. Follower 3 reciprocates in fixed guides B-B and carries rollers 4 and 5 of which roller 4 rolls along working surface b of cam 1 and roller 5 rolls along surface a of cam 2. Positive motion is achieved because the sums of all opposing radius vectors, one to a point of the theoretical, or pitch, curve of cam 1 and the other to the opposing point of the pitch curve of cam 2, are constant and equal to the distance between the centres of rollers 4 and 5.
$3131$SmC,LL$
|





