 Premi per ingrandire Premi per ingrandire
|
Description
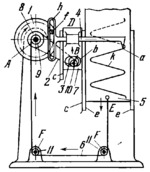
Link 1 rotates about fixed axis A, carries pin f and is rigidly attached to pulleys 8 and 9. Flexible link 2 runs over pulley 8 and pulley 10 which rotates about fixed axis B and is rigidly attached to eccentric 3. Eccentric 3 is confined between horizontal surfaces of yoke 7 which reciprocates along fixed guides c-c. Pin f of link 1 slides along straight slot h of link 4 which reciprocates in guide D of yoke 7. Flexible link 6, attached to pulley 9, runs over pulleys 11 which rotate about fixed axes F. The other end of link 6 is attached at point E to slide 5 which has translational motion along guides e-e. When link 1 Rotates, motion is transmitted through flexible link 2 to eccentric 3 which makes two revolutions to each revolution of link 1 and reciprocates yoke 7. At the same time, link 4 is reciprocated horizontally by pin f , and slide 5 is transversed downward by flexible link 6. At this, point a of link 4 describes sinusoid-type curve k on slide 5 (as shown).
$3564$CFL,Ge$
|





