| Premi per ingrandire |
|
Structure of mechanism |
| Function |
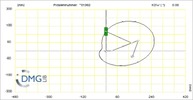
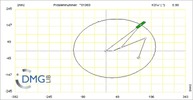
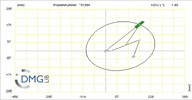
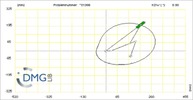
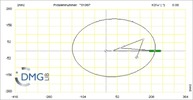
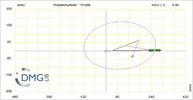
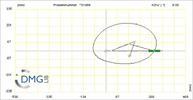
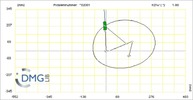
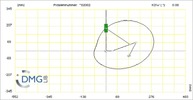
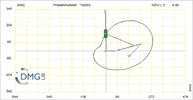
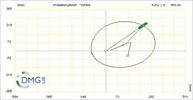
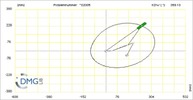
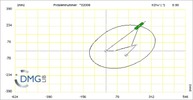
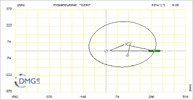
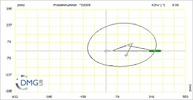
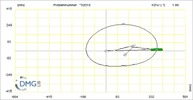
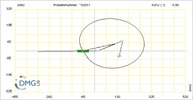
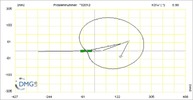
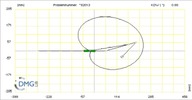
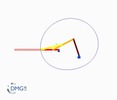
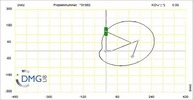
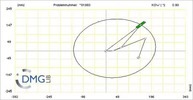
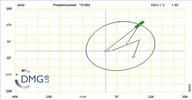
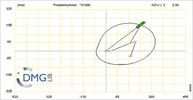
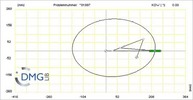
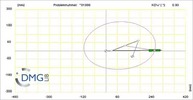
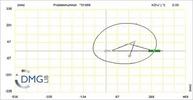
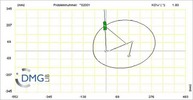
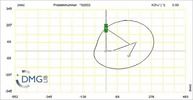
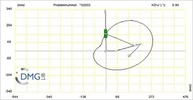
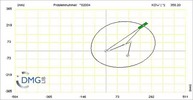
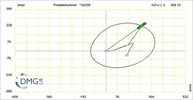
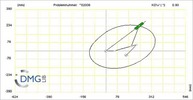
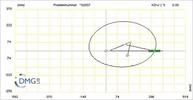
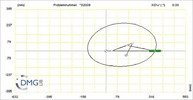
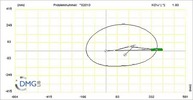
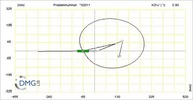
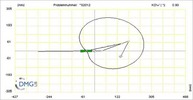
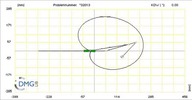
The mechanism contains a RRT kinematic chain connected in parallel with a four bar linkage. The kinematic chain RRT´s joints are connected with the coupler and the crank of the four bar linkage. By means of changing the geometrical lengths of the mechanism´s links, the slider block point M describes a range of coupler curves. |
| Comment |
The interactive animations and movies were generated for the following dimensions:
Variant 1: x = 140 mm, y = 40 mm, l2 = 30 mm, l3= 160 mm, l3´ = 40 mm, l4 = 120 mm, α = 90°, l5 = 160 mm
Variant 2: x = 140 mm, y = 40 mm, l2 = 30 mm, l3= 160 mm, l3´ = 80 mm, l4 = 120 mm, α = 90°, l5 = 160 mm
Variant 3: x = 140 mm, y = 40 mm, l2 = 30 mm, l3= 160 mm, l3´ = 120 mm, l4 = 120 mm, α = 90°, l5 = 160 mm
Variant 4: x = 140 mm, y = 40 mm, l2 = 30 mm, l3= 160 mm, l3´ = 40 mm, l4 = 120 mm, α = 45°, l5 = 160 mm
Variant 5: x = 140 mm, y = 40 mm, l2 = 30 mm, l3= 160 mm, l3´ = 80 mm, l4 = 120 mm, α = 45°, l5 = 160 mm
Variant 6: x = 140 mm, y = 40 mm, l2 = 30 mm, l3= 160 mm, l3´ = 120 mm, l4 = 120 mm, α = 45°, l5 = 160 mm
Variant 7: x = 140 mm, y = 40 mm, l2 = 30 mm, l3= 160 mm, l3´ = 40 mm, l4 = 120 mm, α = 0°, l5 = 160 mm
Variant 8: x = 140 mm, y = 40 mm, l2 = 30 mm, l3= 160 mm, l3´ = 80 mm, l4 = 120 mm, α = 0°, l5 = 160 mm
Variant 9: x = 140 mm, y = 40 mm, l2 = 30 mm, l3= 160 mm, l3´ = 120 mm, l4 = 120 mm, α = 0°, l5 = 160 mm
Variant 10: x = 140 mm, y = 40 mm, l2 = 30 mm, l3= 160 mm, l3´ = 120 mm, l4 = 120 mm, α = 90°, l5 = 200 mm
Variant 11: x = 140 mm, y = 40 mm, l2 = 30 mm, l3= 160 mm, l3´ = 120 mm, l4 = 120 mm, α = 90°, l5 = 200 mm
Variant 12: x = 140 mm, y = 40 mm, l2 = 30 mm, l3= 160 mm, l3´ = 120 mm, l4 = 120 mm, α = 90°, l5 = 200 mm
Variant 13: x = 140 mm, y = 40 mm, l2 = 30 mm, l3= 160 mm, l3´ = 120 mm, l4 = 120 mm, α = 45°, l5 = 200 mm
Variant 14: x = 140 mm, y = 40 mm, l2 = 30 mm, l3= 160 mm, l3´ = 120 mm, l4 = 120 mm, α = 45°, l5 = 200 mm
Variant 15: x = 140 mm, y = 40 mm, l2 = 30 mm, l3= 160 mm, l3´ = 120 mm, l4 = 120 mm, α = 45°, l5 = 200 mm
Variant 16: x = 140 mm, y = 40 mm, l2 = 30 mm, l3= 160 mm, l3´ = 120 mm, l4 = 120 mm, α = 0°, l5 = 200 mm
Variant 17: x = 140 mm, y = 40 mm, l2 = 30 mm, l3= 160 mm, l3´ = 120 mm, l4 = 120 mm, α = 0°, l5 = 200 mm
Variant 18: x = 140 mm, y = 40 mm, l2 = 30 mm, l3= 160 mm, l3´ = 120 mm, l4 = 120 mm, α = 0°, l5 = 200 mm
Variant 19: x = 140 mm, y = 40 mm, l2 = 30 mm, l3= 160 mm, l3´ = 120 mm, l4 = 120 mm, α = 180°, l5 = 200 mm
Variant 20: x = 140 mm, y = 40 mm, l2 = 30 mm, l3= 160 mm, l3´ = 120 mm, l4 = 120 mm, α = 180°, l5 = 200 mm
Variant 21: x = 140 mm, y = 40 mm, l2 = 30 mm, l3= 160 mm, l3´ = 120 mm, l4 = 120 mm, α = 180°, l5 = 200 mm. |
| Dimension of mechanism |
planar |
| Number of links |
6 |
| Drive movement |
Rotation |
| Output movement |
Rotation combined with rectilinear translation |
| Degree of freedom |
1 |
| Number of inputs |
1 |
| Number of followers |
1 |
| Revolution ability |
yes |
| Revolution ability of input link |
yes |
| Relative position between drive and output |
parallel |
| |
|






 Animations
Animations CAX files
CAX files Videos
Videos Images
Images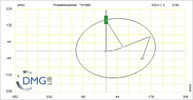
 Start interactive animation
Start interactive animation