Structura mecanismului |
| Funcţie |
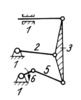
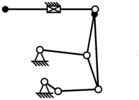
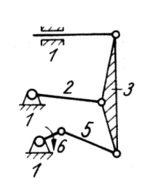
Für das Lehrbeispiel 2.12 lassen sich, unter Berücksichtigung der gegebenen Randbedingungen, aus den beiden sechsgliedrigen zwangläufigen Ketten drei mögliche Strukturen ableiten (vgl. Bild 3.39):
Das hier dargestellte Getriebe stellt das Stephenson-3-Getriebe mit Antrieb am Zweischlag dar, aus dem sich mögliche Getriebevarianten ableiten lassen. |
| Comment |
Volmer Lehrbeispiel 2.12 |
| Dimensiunea mecanismului |
plan |
| Numărul de elemente |
6 |
| mişcarea de antrenare |
Rotaţie |
| Mişcarea elementului de ieşire |
Translaţie rectilinie |
| Grad de libertate |
1 |
| Numǎrul elementelor de intrare |
1 |
| Numǎrul tacheţilor |
1 |
| Posibilitatea unei rotaţii complete |
da |
| Posibilitatea unei relaţii complete a elementului de intrare |
da |
| Poziţia relativǎ dintre intrare şi ieşire |
paralel |
| |
Funcţia de transfer |
| Mimişcarea de ieşire |
deviaţie mare |
| |
Aplicaţie |
| Domeniul de aplicaţie |
: not recognisable |
| Exemple de aplicare |
Getriebesystematik / Struktursynthese |
| |






 Animations
Animations CAX files
CAX files Images
Images

 Start interactive animation
Start interactive animation