Structura mecanismului |
| Funcţie |
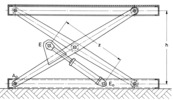
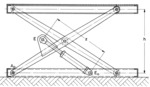
Bild 2.1/7 zeigt eine Hebebühne, deren obere Platform durch einen Hydraulikzylinder zwischen den Drehgelenken E0 und E gehoben und gesenkt werden kann.
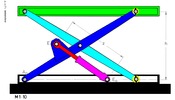
Das kinematische Schema der Hebebühne (Bild 2.1/8) zeigt ein sechsgliedriges Getriebe mit fünf Drehgelenken (A0, E0, A, E, C), einem Schubgelenk zwischen Hydraulikkolben und -zylinder (Glieder 4 und 5) und zwei Gleitdrehgelenken. Ersetzt man die Gleitdrehgelenke durch Gleitsteine mit Dreh- und Schubgelenken, erhält man das hier beschriebene äquivalente achtgliedrige Kurbelgetriebe mit Dreh und Schubgelenken. |
| Dimensiunea mecanismului |
plan |
| Numărul de elemente |
8 |
| mişcarea de antrenare |
Translaţie rectilinie |
| Mişcarea elementului de ieşire |
Mişcarea de bază |
| Grad de libertate |
1 |
| Numǎrul elementelor de intrare |
1 |
| Numǎrul tacheţilor |
1 |
| Posibilitatea unei rotaţii complete |
nu |
| Posibilitatea unei relaţii complete a elementului de intrare |
nu |
| Poziţia relativǎ dintre intrare şi ieşire |
paralel |
| |
Funcţia de ghidare |
| Direcţia traiectoriei |
acelaşi sens |
| Orientarea elementului de ieşire |
paralel |
| Dimensiunea mecanismului |
plan |
| Originea intrǎrii |
posibil |
| Evoluţia orientǎrii elementului de ieşire |
amestecate |
| |
Aplicaţie |
| Domeniul de aplicaţie |
Academic use and Other fields |
| Exemple de aplicare |
Hebebühne |
| |






 Animations
Animations Images
Images
 Start interactive animation
Start interactive animation