 Click pentru a mări Click pentru a mări
|
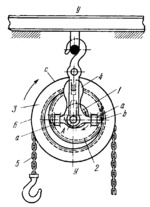
Description
The carrier is designed as round eccentric 1 which rotates about axis A of crosspiece 4. Crosspiece 4 can slide vertically along axis y-y and has a collar encircling eccentric 1 and two pins b which slide horizontally in guides a-a of gear 2. Gear 2 is connected by a turning pair to eccentric 1 and meshes with internal gear 3 which rotates about axis A and is rigidly attached to (or integral with) chain sheave 6. Hoisting chain 5 runs over sheave 6. The speeds n₁ and n₃ of carrier 1 and gear 3 (in rpm) are related by the equation n₃=n₁(z₃-z₂)/z₃ where z₂ and z₃ are the numbers of teeth of gears 2 and 3. When eccentric 1 rotates, gear 2 has a circular translational motion, gear 3 and sheave 6 rotate at a much lower speed than eccentric 1, and chain 5 hoists the required load with a large mechanical advantage.
$2956$CxG,MH$
|





