 Click pentru a mări Click pentru a mări
|
Description
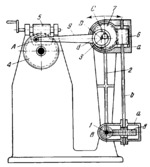
Link 2 turns about fixed axis B and has housings a which contain worm-gearing mechanisms consisting of worms 1 and 6 and worm wheels 8 and 7. Worm 1 rotates about axis B and transmits rotation through worm wheel 8, intermediate shaft b and worm 6 to worm wheel 7 and eccentric 3. Eccentric 3 rotates together with worm wheel 7 about axis C and is encircled by collar d of link 9 which turns about fixed axis A. Thus the mechanism is the four-bar double-swing linkage ADCB of which the eccentric, belonging to the connecting rod, is the driving link. When worm 1 rotates about axis B, link 2 oscillates about this axis. The angle of oscillation of link 2 can be adjusted by changing the position of fixed axis A. This is done by turning worm 5 and thereby transmitting rotation to worm wheel 4 on which the axis of rotation of link 9 is rigidly attached.
$1748$GL,ML$
|





