 Click pentru a mări Click pentru a mări
|
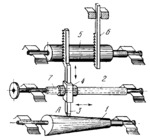
Description
The mechanism serves to represent rectilinear translational motion given as a function of two independent variables. The position of driven link 5 is a function of the position of driving cam 1: z=f(x_A,α) where x_A is the coordinate of point of contact A of follower 3 with cam 1, and α is the angle of rotation of cam 1. Follower 3 has simultaneous translational motions up or down and right or left. Screw 7 is rotated according to the law of variation of x_A. Follower 3 has a gear rack which rotates gear 5 an amount proportional to z, and gear 5 traverses rack 6. Rack 6 travels in fixed guides according to the equation z=f(x_A,α).
$3325$GrC,MO$
|





