 Click pentru a mări Click pentru a mări
|
Description
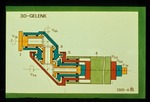
Handgelenke von IR haben ein bis drei Drehgelenke (D), d. h., ein bis drei Antriebsbewegungen sind in sie einzuleiten. Im Beispiel des Bildes werden die 3 Antriebsbewegungen über 3 ineinander laufende Wellen (rot, blau und gelb) im Armglied 4 (grün) in das 3D-Gelenk eingeleitet. Die 3 Drehwinkel φ54 (Drehung des Gliedes 5 gegenüber Glied 4), φ65 und φ76 sind teilweise voneinander abhängig: Stehen z. B. die Wellen blau und gelb und wird Welle rot bewegt, resultieren daraus Drehungen φ65 und φ76. Für das Erreichen einer programmierten Position des Anschlußflansches 7 müssen alle 3 Antriebe in steuerungstechnischer Kopplung bewegt werden.
Attributes
|





