|
|
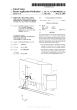
Robot d'impression numérique grand format à 5 degré de liberté |
  | Cliquez pour agrandir |
|
Structure du mécanisme |
| Fonction |
Ce mécanisme est un robot d'impression grand format en trois dimension sur une surface fixe. Ce robot possède cinq axes motorisés. Il est composé d'un bloc d'impression à jet d'encre, d'un poignet à deux degrés de rotation perpendiculaires qui assure l'orientation du bloc d'impression et d'un porteur à trois degrés de translation perpendiculaires qui permet d'assurer le positionnement du bloc d'impression. Ce système possède au moins une unité de contrôle des déplacements et un système de séchage de l'encre projetée. |
| Comment |
Auteurs: Elsa Vulliez
IFMA (Institut Français de Mécanique Avancée) – http://www.ifma.fr
Clermont-Ferrand, France |
| taille |
Spatial |
| Nombre de liaison |
9 |
| Mouvements input |
Translation rectiligne |
| Degré de liberté |
5 |
| Nombre d'entrées |
4 |
| Nombre de pièces intermédiaires |
5 |
| Capacité rotative du solide d'entrée |
Non |
| |
Fonction de guidage |
| |
Application |
| Exemples d'utilisation |
L'impression sur des surfaces fixes. |
| |
|
| Collections |
| |
|
| Permanent links |
| |
|
| Data provider |
| |
|
| Administration |
| |
| Lieu |
|
IFMA (French Institute for Advanced Mechanics) |
| Persons |
|
Editeur: Cousturier, Richard (Ed.)
producteur: Vulliez, Elsa |
| Date de production |
|
September 2010 - January 2011 |
|
| Further media formats |
 Animations Animations |
|
 Fichiers xAO Fichiers xAO |
|
 Documents Documents |
|
 Videos Videos |
|
 Images Images |
|