 Click to enlarge Click to enlarge
|
Description
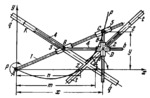
Link 1, turning about fixed axis A, is connected by sliding pairs to sliders 3 and 5 . Slider 3 is connected by turning pair B to slider 4 which moves along fixed guides q-q. The axis of guides q-q makes the angle β with axis Ax. Cross-piece Bb of slider 4 is connected by a sliding pair to cross-shaped slider 2 which has guides with axes perpendicular to each other. Slider 2 moves along fixed guides t-t whose axis makes the angle α with axis Ax. Link 6, connected by turning pair C to slider 5, moves in slider 2. When link 1 turns about axis A, point C describes hyperbola p-p wi th the equation ex²+fxy+2gx+2hy=0 where e=tan(α)tan(β), f=tan(α), g=n*tan(α)tan(β)/2, h=(m*tan(β)-n*tan(α))/2, m and n = constant dimensions of the mechanism.
$1083$LG,Ge$
|





