 Click to enlarge Click to enlarge
|
Description
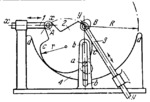
Link 2 is designed as a cam whose profile c-c is along a circular arc of radius r. Cam 2 rolls without slipping along fixed cam 4 whose profile is along a circular arc of radius R. Pin a of cam 2 slides along fixed guides b-b. The centre of pin a lies on circular arc c-c. If radius R=2r, then any point of link 2 lying on circular arc c-c moves along a straight line passing through the centre of circular arc d-d. Thus the mechanism converts translational motion of link 1 along axis x-x into translational motion of link 3 along axis y-y making an arbitrary angle with axis x-x.
$1722$LC,RL$
|





