  | Cliquez pour agrandir |
|
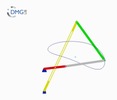
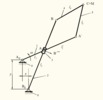
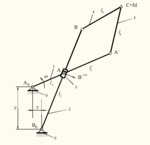
Structure du mécanisme |
| Fonction |
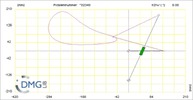
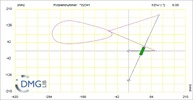
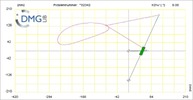
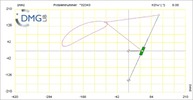
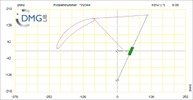
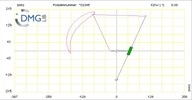
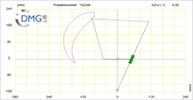
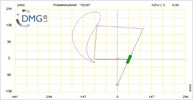
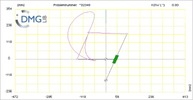
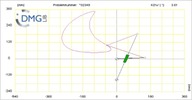
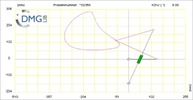
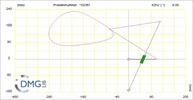
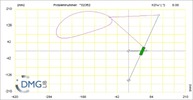
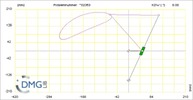
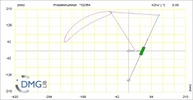
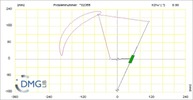
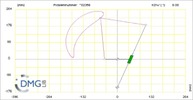
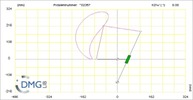
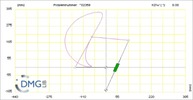
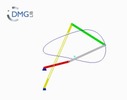
The mechanism contains a RRR kinematic chain connected in parallel with an inverted slider crank. The kinematic chain RRR´s joints are connected with the crank and the slider of the slider crank. By means of changing the geometrical lengths of the mechanism´s links, the coupler point M describes a range of coupler curves. |
| Comment |
The interactive animations and movies were generated for the following geometrical dimensions:
Variant 1: x = 0 mm, y = 100 mm, l1 = 50 mm, l1´= 100 mm, l2 = 350 mm, l4 = 200 mm, l5 = 200 mm
Variant 2: x = 0 mm, y = 100 mm, l1 = 50 mm, l1´= 80 mm, l2 = 350 mm, l4 = 200 mm, l5 = 200 mm
Variant 3: x = 0 mm, y = 100 mm, l1 = 50 mm, l1´= 50 mm, l2 = 350 mm, l4 = 200 mm, l5 = 200 mm
Variant 4: x = 0 mm, y = 100 mm, l1 = 50 mm, l1´= 20 mm, l2 = 350 mm, l4 = 200 mm, l5 = 200 mm
Variant 5: x = 0 mm, y = 100 mm, l1 = 50 mm, l1´= 0 mm, l2 = 350 mm, l4 = 200 mm, l5 = 200 mm
Variant 6: x = 0 mm, y = 100 mm, l1 = 50 mm, l1´= -25 mm, l2 = 350 mm, l4 = 200 mm, l5 = 200 mm
Variant 7: x = 0 mm, y = 100 mm, l1 = 50 mm, l1´= -75 mm, l2 = 350 mm, l4 = 200 mm, l5 = 200 mm
Variant 8: x = 0 mm, y = 100 mm, l1 = 50 mm, l1´= -100 mm, l2 = 350 mm, l4 = 200 mm, l5 = 200 mm
Variant 9: x = 0 mm, y = 100 mm, l1 = 50 mm, l1´= -150 mm, l2 = 350 mm, l4 = 200 mm, l5 = 200 mm
Variant 10: x = 0 mm, y = 100 mm, l1 = 50 mm, l1´= -200 mm, l2 = 350 mm, l4 = 200 mm, l5 = 200 mm
Variant 11: x = 0 mm, y = 100 mm, l1 = 50 mm, l1´= 100 mm, l2 = 350 mm, l4 = 220 mm, l5 = 180 mm
Variant 12: x = 0 mm, y = 100 mm, l1 = 50 mm, l1´= 80 mm, l2 = 350 mm, l4 = 220 mm, l5 = 180 mm
Variant 13: x = 0 mm, y = 100 mm, l1 = 50 mm, l1´= 50 mm, l2 = 350 mm, l4 = 220 mm, l5 = 180 mm
Variant 14: x = 0 mm, y = 100 mm, l1 = 50 mm, l1´= 20 mm, l2 = 350 mm, l4 = 220 mm, l5 = 180 mm
Variant 15: x = 0 mm, y = 100 mm, l1 = 50 mm, l1´= 0 mm, l2 = 350 mm, l4 = 220 mm, l5 = 180 mm
Variant 16: x = 0 mm, y = 100 mm, l1 = 50 mm, l1´= -25 mm, l2 = 350 mm, l4 = 220 mm, l5 = 180 mm
Variant 17: x = 0 mm, y = 100 mm, l1 = 50 mm, l1´= -75 mm, l2 = 350 mm, l4 = 220 mm, l5 = 180 mm
Variant 18: x = 0 mm, y = 100 mm, l1 = 50 mm, l1´= -100 mm, l2 = 350 mm, l4 = 220 mm, l5 = 180 mm
Variant 19: x = 0 mm, y = 100 mm, l1 = 50 mm, l1´= -150 mm, l2 = 350 mm, l4 = 220 mm, l5 = 180 mm
Variant 20: x = 0 mm, y = 100 mm, l1 = 50 mm, l1´= -200 mm, l2 = 350 mm, l4 = 220 mm, l5 = 180 mm. |
| taille |
Plan |
| Nombre de liaison |
6 |
| Mouvements input |
Rotation |
| Mouvement de sortie |
Rotation combinée avec une translation rectiligne |
| Degré de liberté |
1 |
| Nombre d'entrées |
1 |
| Nombre de pièces intermédiaires |
1 |
| Model révolution |
Oui |
| Capacité rotative du solide d'entrée |
Oui |
| Position relative de la pièce intermédiaire par rapport à la sortie |
Parallèle |
| |
|






 Animations
Animations Fichiers xAO
Fichiers xAO Images
Images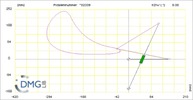
 Start interactive animation
Start interactive animation