 Click to enlarge Click to enlarge
|
Description
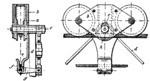
The problem was solved in 1896 by the introduction of a device by Bleichert, illustrated in the figure. This grip goes by the name of the "Automat," and consists of a sliding block a, which moves in a vertical direction in the frame b. A pin c is attached to this block, and the carrying frame d is suspended from this pin. One of the jaws e is rigidly connected with the framework of the trolley, whilst the other one f is connected to the sliding block a (and indirectly to the pin c) by a connecting link g.
|





