 Click to enlarge Click to enlarge
|
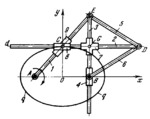
Description
Link 1, rotating about fixed axis A, is connected by a sliding pair to slider 9 and by turning pair E to link 5 . Link 3 is connected by turning pair E to links 5 and 1, and moves in cross-shaped slider 7 which has guides wi th axes perpendicular to each other. Link 2 is connected by turning pair D to links 5 and 6 and moves in sliders 7 and 8. Sliders 8 and 9 are connected together by turning pair C. Link 6 rotates about fixed axis B. Link 3 slides in slider 4 which rotates about fixed axis B. Centres A and B are placed at the foci of an ellipse or hyperbola and the lengths of links 5 and 6 are taken equal (E͞D=D͞B) . Then, when link 1 rotates, point C describes an ellipse or hyperbola and straight line Dd envelops the ellipse or hyperbola. As shown, the mechanism is set up for generating ellipse q-q. The centre 0 of the ellipse Is located in the middle between foci A and B.
$1047$LG,Ge$
|





