 Click to enlarge Click to enlarge
|
Description
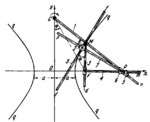
Link 1, turning about fixed axis G, is connected by turning pair M to link 3 which has the form of a bent lever with the angle dMf equal to ϕ. Arm Md of link 3 slides in slider 4 which turns about fixed axis F. Arm Mf of link 3 moves in cross-shaped slider 2 which has guides perpendicular to each other. Sliders 6 and 5, connected together by turning pair P, move along directions Fm and Gn of links 4 and 1. Centre F is placed at one focus of a hyperbola and centre G on axis Oy, passing through centre 0 of the hyperbola, so that the distance G͞0 equals G͞0=0͞F/tan(ϕ). The length G͞M of link 1 is taken equal to G͞M=a/sin(ϕ), where a is the transverse semiaxis of the hyperbola. Then, when link 1 turns about axis G, straight line Mf envelops hyperbola q-q and point B of slider 2, at the intersection of lines Pp and M f, describes hyperbola q-q.
$1091$LG,Ge$
|





