 Click to enlarge Click to enlarge
|
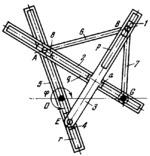
Description
The mechanism is based on four-bar linkage OABG. Slider 1, connected by turning pairs B to links 6 and 7, moves along slot p of link 3. Link 3 is rigidly secured to slider a whose axis of sliding is perpendicular to slot p. Slider a of link 3 moves along slot q of link 2 which turns about fixed axis G. Link 2 is connected by a sliding pair to slider 8. Slider 8 is connected by turning pair A to link 5 which turns about fixed axis 0. Link 3 is connect- ed by turning pair E to slider 4 which moves along slot r of link 5. Point E describes a conic section with the equationρ=p/(1+e*cos(ϕ)) where ρ=0͞E, p=(0͞G²+A͞B²-0͞A²-G͞B²)/20͞A, e=0͞G/0͞A. Point E describes an ellipse when e<1, a parabola when e=1 and a hyperbola when e>1. The axis of guiding slot p of link 3 is always tangent to the traced conic section. The mechanism is set up for tracing various conic sections by changing length OA of link 5 . This is done by adjust ing pivot A along slot r and clamping it in the required position.
$1117$LG,Ge$
|





