 Click to enlarge Click to enlarge
|
Description
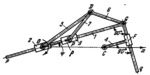
The lengths of the links comply with the conditions: D͞P=D͞G and 0͞Px0͞G=0͞D²-D͞G²=const. Link 4 turns about fixed axis C. Link 1 has the form of a bent lever. Arm Gq of link 1 slides in guide F of link 4, and arm Gp moves in sliders 3 and 2. Slider 2 turns about fixed axis 0. Link 5 is connected by turning pairs 0 and D to slider 2 and to links 6 and 7. Link 6 is connected by turning pair G to link 1 , and link 7 by turning pair P to slider 3. When slider 2 turns about axis 0, point P describes a conic section with the equation ρ=p/(1+e*cos(ϕ)) where ρ=0͞P, p=(0͞D²-D͞G²)/C͞F, e=0͞C/C͞F, ϕ = polar angle between vector ρ and the polar axis Ox. Point P describes an ellipse when e<1, a parabola when e=1 and a hyperbola when e>1.
$1119$LG,Ge$
|





