 Click to enlarge Click to enlarge
|
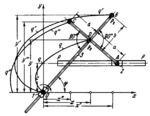
Description
Slider 1 turns about fixed axis 0. Link 3, having the form of a cross-shaped lever, is connected by a sliding pair to slider 1 and by turning pair A to slider 2. Slider 2 moves along fixed guides p-p whose axis is parallel to axis 0x. When slider 1 turns about axis 0, point D of link 3 describes Pankappa curve q-q with the equation ρD=0͞D=(c/sin(ϕ))+(a/tan(ϕ)) or a²x²-(y-c)²(x²+y²). Point B of link 3 describes conchoid q' -q' of the Pankappa curve; the equation of the conchoid is ρB=0͞B=(c/sin(ϕ))+(a/tan(ϕ))±b or (ax'+by')²=(y'-c)²(x'²+y'²). Point C of link 3 describes orthoconchoid q" -q" of the Pankappa curve; the equation of the orthoconchoid is ρC=0͞C=sqrt(((c/sin(ϕ))+(a/tan(ϕ)))²+d²) or x"²[(a+d)²-(y"-c)²]=[(y'-c)-d(c+d)²] where a, b, c and d = constant dimensions of the mechanism, complying with the condition c<a; ϕ = polar angle between vector ρD and polar axis 0x.
$1158$LG,Ge$
|





