 Click to enlarge Click to enlarge
|
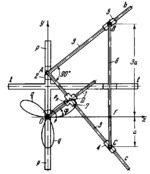
Description
The lengths of the links comply with the conditions: F͞C=a and B͞F=3a. Link 1, rotating about fixed axis 0, is connected by a sliding pair to cross-shaped slider 7 which has guides perpendicular to each other. Link 3 has the form of a bent lever with angle cAb equal to 90°. Link 3 is connected by turning pair A to slider 2 which moves along fixed guides p-p whose axis coincides wi th axis 0y. Arm Ab of link 3 is connected by a sliding pair to slider 5, and arm Ac by a sliding pair to slider 4. Slider 6 moves along fixed guides t-t whose axis is parallel to axis Ox. Slider 6 is connected by turning pairs B and C to sliders 5 and 4. When link 1 rotates about axis 0, point D of slider 7 describes three-leafed rose q-q with the equation ρD=0͞D=a*sin(3ϕ) where ϕ is the polar angle between vector ρD and polar axis 0x.
$1160$LG,Ge$
|





