 Click to enlarge Click to enlarge
|
Description
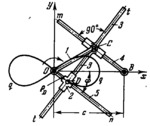
The lengths of the links comply with the conditions: 0͞C=a, 0͞B=c=sqrt(a²+b²) and a<c, where a and b are the transverse and conjugate semiaxes of the hyperbola. Link 1 turns about fixed axis 0 and is connected by turning pair C to slider 3. Slider 3 moves along axis Bm of link 4 which turns about fixed axis B. Cross-piece t-t of slider 3 is connected by a sliding pair to cross-shaped slider 2 which has guides perpendicular to each other. Slider 2 moves along axis 0n of link 5 which rotates about axis 0. Centre 0 is placed at the centre of the hyperbola and centre B at one of its foci. Then, when link 1 turns about axis 0, point D of slider 2 describes pedal curve q-q of the hyperbola. The equation of the pedal curve is ρD=0͞D=sqrt(a²-c²*sin²(ϕ)) or (x²+y²)²=a²x²-b²y² where ϕ is the polar angle between vector ρD and polar axis 0x. If the lengths of the links comply with the condition c=sqrt(2a), then point D describes a lemniscate of Bernoulli with the equation ρD=0͞D=a*sqrt(2cos²(ϕ)) or ( x²+y²)²=4a²(x²-y²).
$1165$LG,Ge$
|





