|
DMG-Lib Home + News
|
Browse
|
Experience DMG-Lib
|
About us
|
Help
|
|
|
|||||||
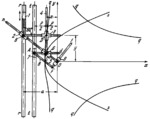
ARTOBOLEVSKY LINK-GEAR MECHANISM FOR TRACING FOURTH-ORDER HYPERBOLAS |
|||||||
|---|---|---|---|---|---|---|---|
 Click to enlarge Click to enlarge
|
Description
Slider 1 moves along fixed guide T-T whose axis is parallel to axis Oy. Slider 1 is connected by turning pair B to slider 2 and by a sliding pair to cross-shaped slider 3 which has guides perpendicular to each other. Slider 7 moves along fixed guides t-t whose axis is parallel to axis Oy. Slider 7 is connected by turning pair A to bent link 8 having angle AFf equal to 90°. Cross-piece Ad of slider 7 has its axis parallel to axis 0x and is connected by a sliding pair to slider 6. Sliders 6 and 5 are connected together by turning pair C. Arm Ff of link 8 is connected by a sliding pair to slider 9 which turns about fixed axis 0. Cross-piece 0n of slider '5 is connected by sliding pairs to sliders 5 and 2. Link 4 is connected by turning pair C to sliders 5 and 6, and by a sliding pair to slider 3. When slider 1 moves along guides r-r, point C of slider 6 describes parabola s-s, and point D of slider 3 describes a fourth-order hyperbola having three branches. The equation of hyperbola q-q is x²y²-2pa²x=a²p² where a and p are constant dimensions of the mechanism. |
||||||
| Linked items | |||||||
|
|||||||
| Permanent links | |||||||
|
|
|||||||
| Data provider | |||||||
|
|
|||||||





