 Click to enlarge Click to enlarge
|
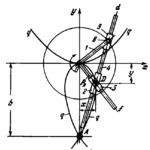
Description
Link 1, having the form of a bent lever with angle BOf equal to 90°, turns about fixed axis 0. Link 1 is connected by turning pair B to slider 3 which moves along axis Ad of link 4. Link 4 turns about fixed axis A. Sliders 2 and 5 are connected together by turning pair D and move along axes Ad and Of of links 4 and 1. When link 1 turns about axis 0, point D of slider 2 describes capricomioid q-q with the equation ρD=0͞D=(ab*sin(ϕ))/(a+b*cos(ϕ)) or b²x²(x²+y²=a²(by-x²-y²)² where a=0͞B= constant dimension of the mechanism, b=0͞A= constant dimension of the mechanism, ϕ = polar angle between vector ρD and polar axis 0x.
$1217$LG,Ge$
|





