 Click to enlarge Click to enlarge
|
Description
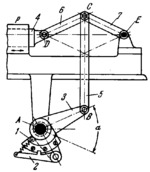
The lengths of the links comply with the condition: C͞D=C͞E. The oscillating motion of shaft A, rigidly secured to sector 1, is transmitted by pawl 2 to bent lever 3, mounted freely on shaft A. Bent lever 3 is oscillated through angle a and imparts reciprocating motion to slider 4 through links 5, 6 and 7. Link 7 turns about fixed axis E, and slider 4 moves in fixed guide p. If slider 4 is jammed, no motion is transmitted to bent lever 3 because the additional force disengages pawl 2 from sector 1, and shaft A oscillates with idle strokes.
$1668$SC,SF$
|





